為何機器人關節模組傾向于采用雙
編碼器設計?
關節模組,作為機器人關節控制系統的核心部件,對機器人的運動控制和動作精確度起著決定性作用。為了確保精確的運動,位置反饋和誤差校正是不可或缺的環節,而雙編碼器設計正是針對這一需求而誕生的。

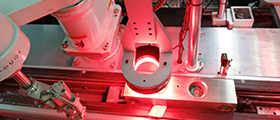
圖為機器人關節內部結構照片
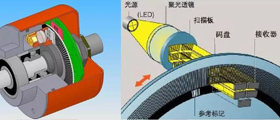
雙編碼器設計由絕對值編碼器和增量編碼器兩部分組成。絕對值編碼器負責提供精確的位置信息,確保機器人關節能夠準確到達指定位置;而增量編碼器則負責實時監測并校正運動過程中的誤差,確保每一步都精準無誤。這兩者的協同作用,使得關節模組的精度和可靠性得到了顯著提升,從而保證了機器人在執行復雜任務時的準確性。
雙編碼器設計的優勢主要體現在以下幾個方面:
精度與穩定性的雙重提升:
雙編碼器系統結合了絕對值編碼器的高精度位置反饋和增量編碼器的實時誤差校正功能,使得機器人在運動過程中能夠始終保持高度的精確性和穩定性。即使在動態復雜的環境中,也能確保動作的精準控制。
可靠性的顯著增強:
雙編碼器設計不僅提高了精度,還顯著增強了機器人的可靠性。當其中一個編碼器出現故障時,另一個編碼器能夠迅速檢測并接管工作,確保關節模組能夠繼續正常穩定運行,從而避免了因單一編碼器故障而導致的機器人停機或動作失誤。
抗干擾能力的有效提升:
在復雜環境中,外界干擾可能會對機器人的穩定性產生影響。而雙編碼器設計通過兩者的協同工作,能夠有效減弱這些干擾對關節運動的影響,確保機器人能夠穩定運行并保持高效性能。
關節模組采用雙編碼器設計的主要目的是為了實現精準的位置反饋和誤差校正,從而提升機器人的精度、穩定性和抗干擾能力。這種設計不僅讓機器人在精密操作中表現出色,還為關節模組提供了長期的可靠性保障。因此,雙編碼器設計已經成為先進機器人關節模組的標配,為機器人在各種復雜應用場景中發揮最佳性能提供了有力支持。
了解更多
機器人編碼器相關知識,敬請關注西安德伍拓自動化傳動系統有限公司網站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養等技術指導服務,盡量避免企業因為編碼器技術人員的短缺帶來的損失,采取拉線上+拉線下服務的服務形式,幫助企業解決技術難題。

 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn